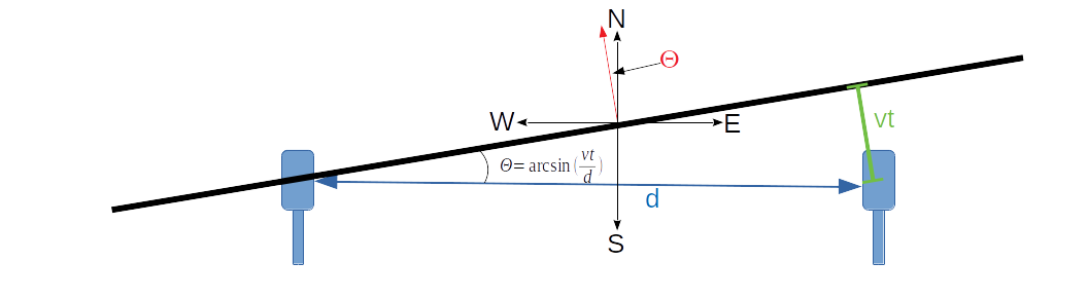
A big part of the success of this project will hinge on getting all the microphones to agree on what time it is. I don’t really care if that time is particularly accurate, as long as all the sensors agree on it. Of course, they’ll never agree exactly, but if I can get them in agreement to within 50-100 microseconds, that should be good enough.
I’ve starting experimenting with the Network Time Protocol (NTP). In theory, this should be satisfactory for what I’m doing. However, the implementation I’ve found for Arduino based systems is pretty basic, and doesn’t implement the full protocol. First, it only exposes the whole number of seconds, and doesn’t expose the fractional part of the seconds. I’ve modified it to expose down to microseconds. Second, it simply takes t2 of the clock synchronization algorithm. It doesn’t do the full offset and round trip delay calculation. This is good enough if all you care about is rough accuracy (+/- 1 second), but apparently isn’t sufficient for what I need. But even if I extend the library further I may not be able to achieve the accuracy I need.
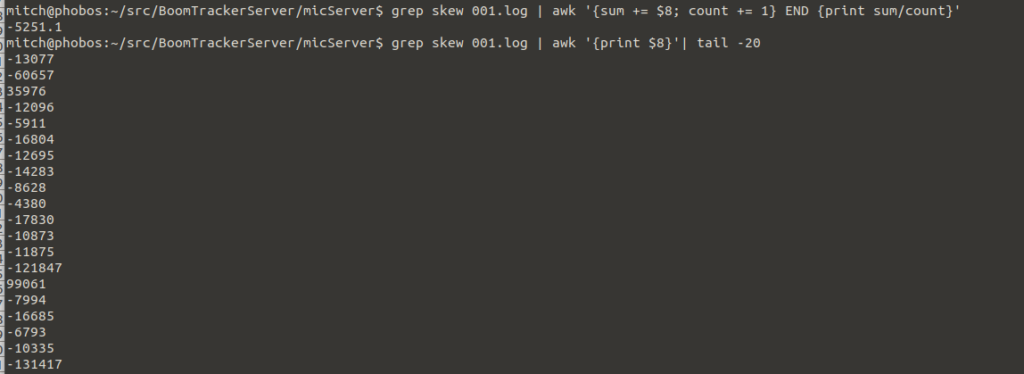
I have my devices syncing to the NTP server on my home box every 10 seconds or so, and I’ve had them log the amount of skew (change in current time) they are seeing every refresh. Over long stretches, it averages about 5,000 microseconds fast per 10 seconds of clock time–which is pretty good and easily compensated for, but individual skews are all over the place. It jumps back and forth by 5,000-120,000 microseconds (5-120 miliseconds) at a time. Keep in mind that with a 20 meter baseline, the delta time is at most 52ms, and usually much less.
This might partly be due to the differing transmission delays that the algorithm currently ignores, (that’s one reason I’m syncing to a local server, to minimize the transmission delays), but 120ms is a pretty big transmission delay for a local network, and is closer to what I would expect for US to Europe round trip.
So what are the sources of error?
- The shortcomings in the current library.
- The stability of the clock on the microcontroller.
- The stability of the clock on the server.
- The inevitable jitter caused by the vagaries of WiFi.
Of those, I can only address the first three sources of error. Time will tell if that’s good enough.