The downside to increasing the sample rate is that I also increased the timing error that accumulates during a sampling buffer. Look at these sequential data buffers:
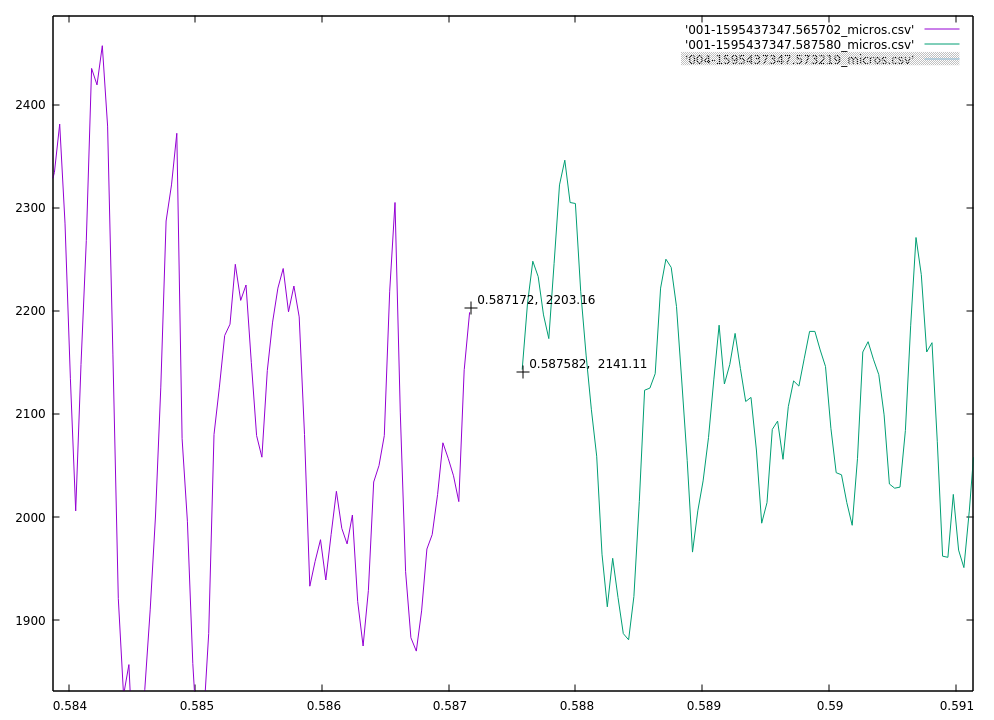
There’s a gap of more than 400 microseconds between the last measurement of the first packet and the first measuement of the second. That gap isn’t real though. There’s actually about a 42-43 microsecond gap in real time, but because I send the measurement interval as a whole number of microseconds between messages, there’s a fraction of a microsecond that gets lost to truncation. In this case, the actual interval of 42.72 microseconds gets truncated to 42 microseconds when sent to the server, and that means that there’s about a 370 microsecond error by the end of the packet (0.72 microseconds * 512 measurements in the packet).
Currently the measurement packet has a 22 bytes of header, including both the timestamp of the beginning of the packet (8 bytes) and the number of microseconds between measurements (2 bytes). I could redesign the measurement packet so that the same two bytes pass 100ths of microseconds rather than whole microseconds, and that would allow up to 655.35 microseconds as a measurement interval without changing the overhead of the packet. (I’ve only got about 1450 bytes to work with in a UDP packet that’s going to travel over WiFi and Ethernet, so I’m trying to be frugal with headers and leave as much space as possible for actual measurements.)