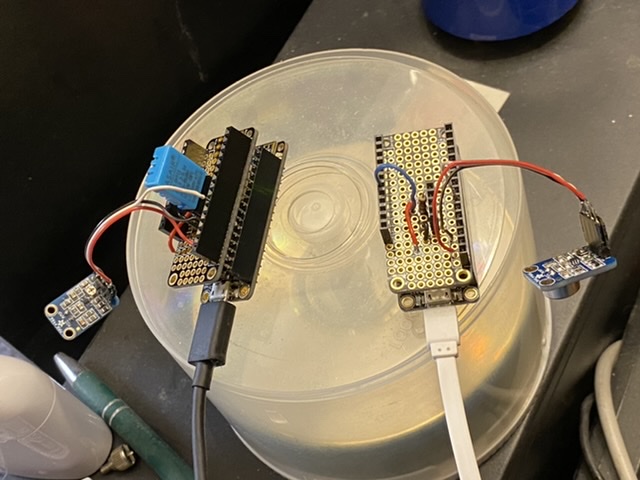
I spent several hours trying to figure out why my circuit on the second M0 microcontroller was having significant timing issues when the first M0 wasn’t. The second M0 didn’t seem to exhibit the problem in my NTP test rig either. I finally figured it out. As you can see below, when I built the second M0, I didn’t have a second DHT-11 temperature and humidity sensor (the blue box–I forgot to order a second one), but I kept the code the same. If I use the preprocessor flag I put in my code to disable all the DHT related calls, the timing issues go away.
Here’s my theory as to what’s happening. The DHT11 product page on Adafruit’s site says that reading the chip requires careful timing. To get the timing right, I suspect that it disables interrupts while reading the chip. If the chip is there then this only takes a few microseconds, and nobody is the wiser. However, if the chip isn’t there, it has to wait for some timeout to happen, and that means interrupts are disabled for a while, and that throws off the millis() and micros() timing functions, which won’t increment while interrupts are disabled. Since my NTP library uses micros() calls frequently to calculate the time since the last server sync, it was accumulating significant errors which were causing the readings to go all over the place.
By the time I’d figured this out, I’d already ripped out a lot of the hairy math I had implemented for calculating gradual skews and correction factors, and replaced it with slightly less hairy math. It’s far more straightforward and easy to understand, and the only downside is that a lot of it is now floating point math, which is slower on some microprocessors.
I’m still seeing about a 1-2 millisecond skew between the readings on the two microphones, and I’m going to have to find a way to adjust for that.