So I’ve gotten initial prototypes of the microphones done and am ready to start playing more seriously with the software.
First the Feather M0 prototype:
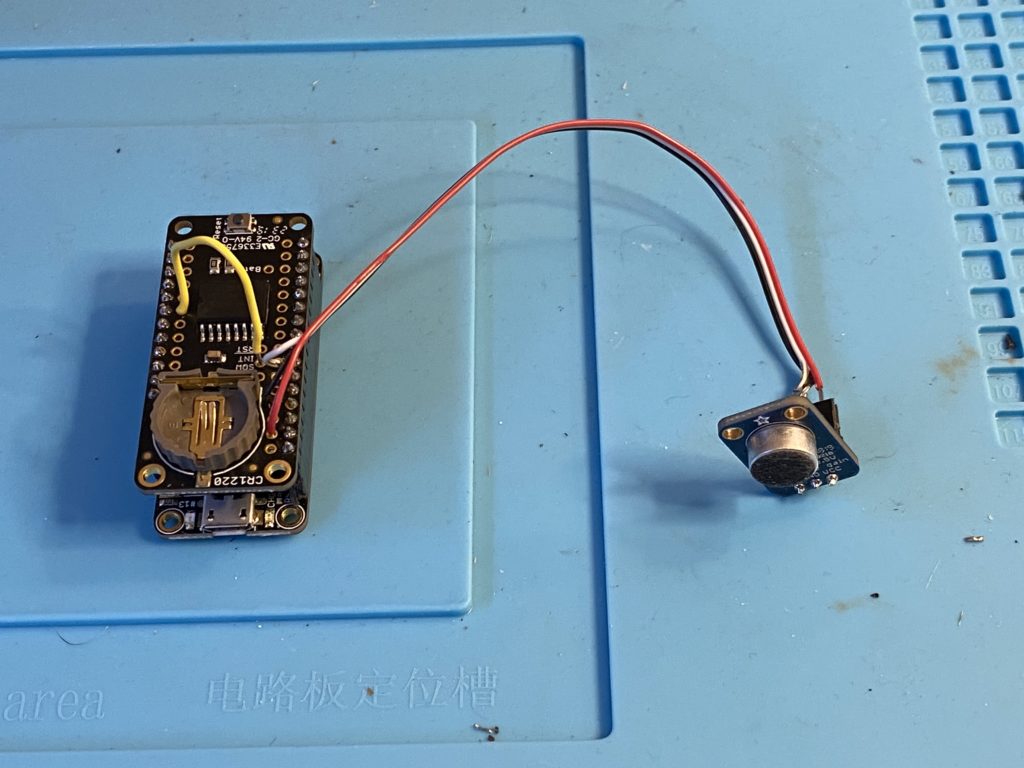
It’s got nice clean lines because most of the magic happens on the existing boards. I had to jumper the 8kHz square wave output of the RTC board to pin 10 so that it could generate timing interrupts, and I connected the microphone directly to power and the A2 analog input.
The Feather Huzzah ESP8266 microphone prototype is a little messier:
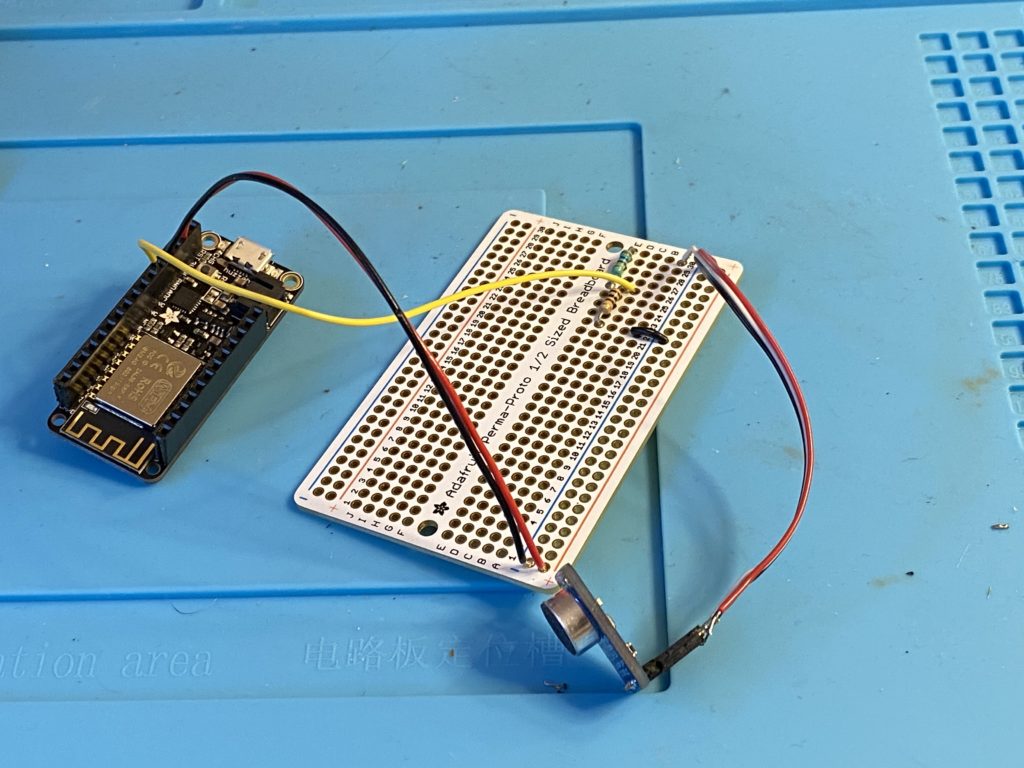
Since the microphone generates voltages from 0-3.3V, and the ADC on the 8266 can only handle a maximum input of 1v, I needed a voltage divider to bring down the mic voltage before feeding it into the analog pin. The proto board is overkill, but I didn’t want to wire it up freeform. I’ll put the DHT11 temperature sensor on this board as well, once it arrives.
So far, the M0 board has behaved well. at least once I managed to update it’s WiFi firmware. The ESP8266 has been more problematic. As long as I keep the sampling rate at 500 Hz or less, it behaves pretty well, but as soon as I try to push it past that, it starts dropping packets (sent and received) on the floor and returning errors. As near as I can tell, this is because more of the WiFi handling is done by the main processor (as opposed to being passed off to the dedicated subprocessor in the M0) and when I’m pushing the read rate up, it starves the main processor of the necessary time to do the WiFi stuff. 500 Hz is 20x less than my target rate of 10kHz though, so unless I can solve this problem by changing strategies, I’m going to have to switch to using the M0, and as I said, that will strain the budget. (Ideally I’d like to keep this under $500, but if I have to spend $55 on each microphone, that will blow almost half the budget there.) Maybe I don’t actually need the RTC chip though. There are cheaper oscillators and I can compensate for temperature using NTP.